06. Process Synchronization-1
in Category / OS
1. 데이터의 접근
데이터가 저장된 위치에서 데이터를 읽어와서 연산을 한 후, 그 결과를 저장된 위치에 다시 저장.
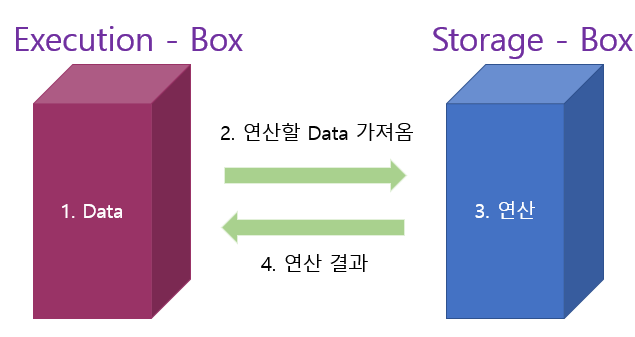
* 문제점? 데이터를 읽기만 하면 문제가 될 것이 없다.
하지만 데이터를 읽어와서 수정을 한 후 다시 결과를 저장하는 경우에는
언제 읽느냐에 따라 달라지는 문제가 생긴다.
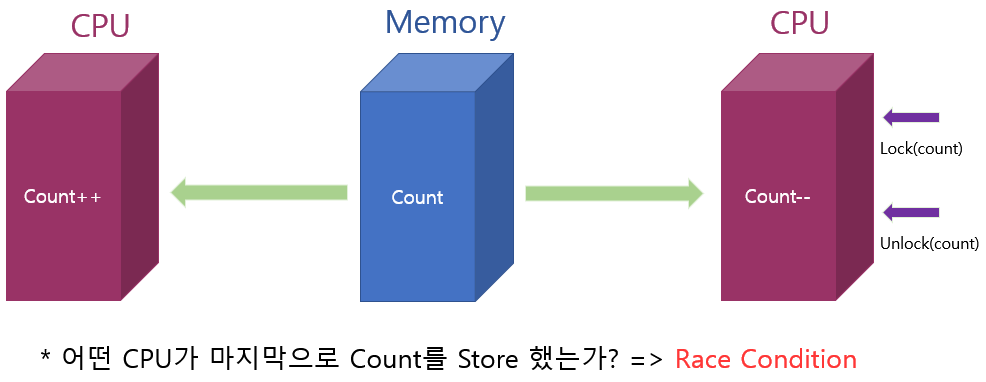
2. Race Condition(경쟁상태)
여러 주체가 하나의 데이터를 동시에 접근하려고 할때 Race Condition(경쟁상태) 라고 한다.
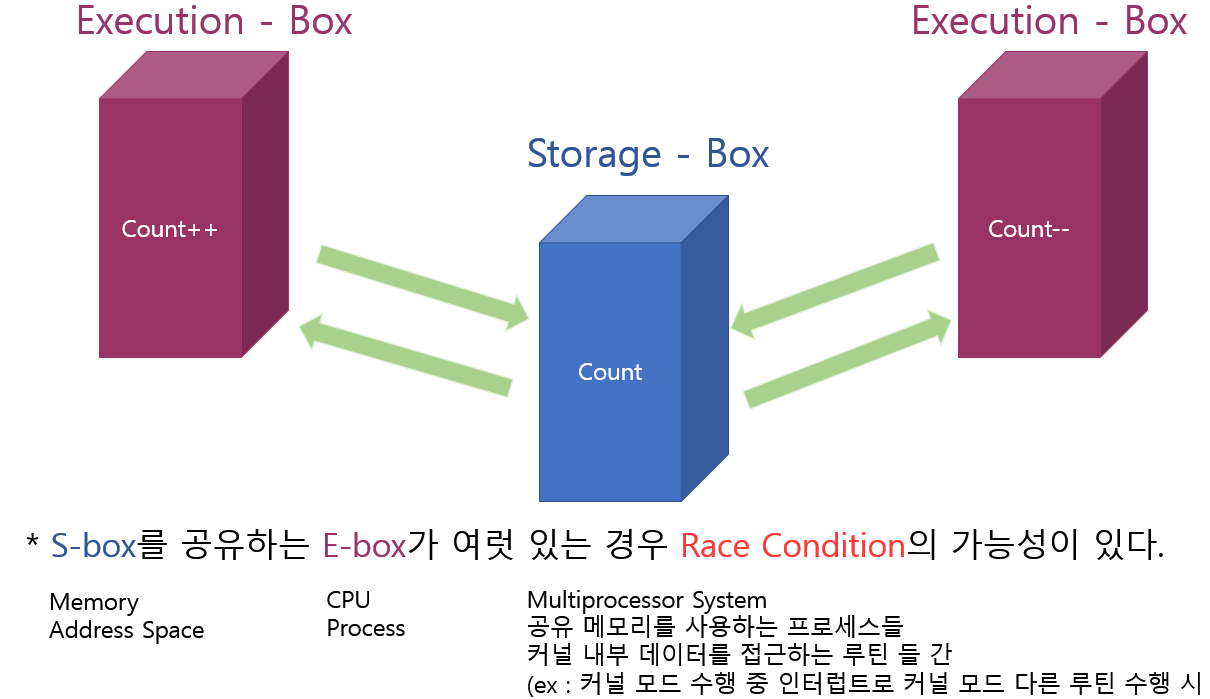
count = 0일때 -> count++ -> count– 하거나
count– > count++ 하면 결과 0이라고 예상
But,
count =0 일때,
왼쪽에서 count(0)를 읽어와 count++ 연산을 수행하고 있을때
오른쪽에서 count(0)를 읽어와 count– 연산을 한다.
왼쪽 결과를 저장 (1) 한 뒤 오른쪽 결과를 다시 저장하면 (-1)로 저장되므로 -1 한 결과만 저장되게 된다. ==> Syncronize 문제
3. OS에서의 Race Condition은 언제 발생하는 가?
1) Kernel 수행 중 인터럽트 발생 시
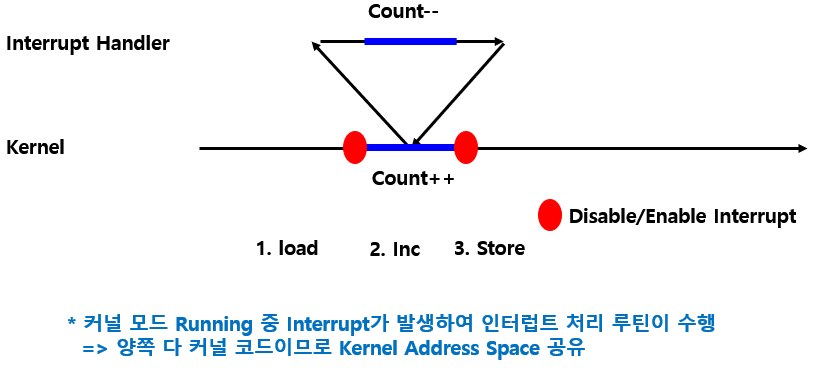
- load 데이터를 읽어 온 후 인터럽트 발생! Context에 Count = 0을 저장해둠.
=> Interrupt Handler 처리 과정에서 Count– 수행 하나 감소 Count = -1 - 다시 되돌아와서 Context 내용을 가져옴 (Count =0)
=> Count++ 수행 Count = 1 - Count = 1을 저장. => 결국 감소 시킨 것은 반영이 되지 않고 1증가 시키는 연산만 반영이 됨!
* 해결방법?
먼저 하던 일을 마저 끝내고 Interrupt를 수행한다.
결국 순서를 정해주면 해결이 가능하나 비효율적일 수 있으므로 잘 조정해야한다.
(= 공유 자원을 건들이는 동안에는 Disable Intterupt로 막는다.)
2) Process가 System Call을 하여 Kernel Mode로 수행 중인데, Context Switch가 일어나는 경우
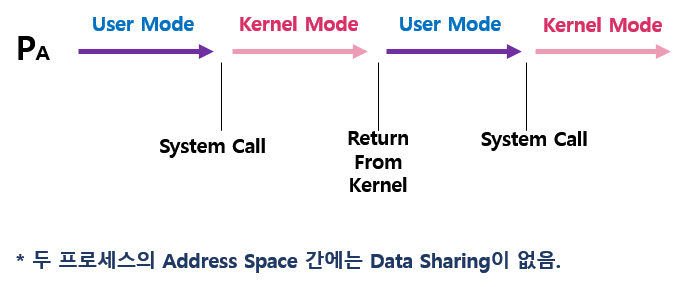
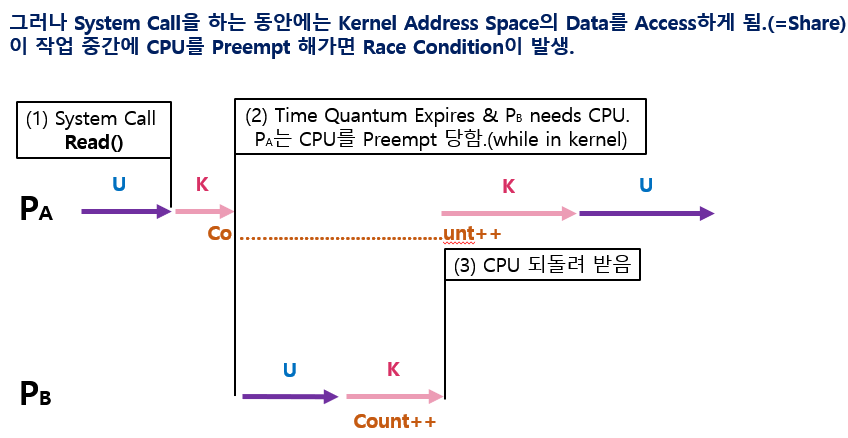
* 해결방법?
Kernel 모드 진행중 Time Quantum이 끝났지만 유보하고 Kernel 연산끝나고 User 모드로 갈때
CPU를 뺏으면 이러한 문제를 해결 할 수있다.
3) Multiprocessor에서 Shared Memory 내의 Kernel Data
Multiprocessor의 경우 Inerrupt Disable/Enable로는 해결이 되지 않는다.
* 해결방법? 방법 1. 한번에 하나의 CPU만이 커널에 들어갈 수 있게 한다.
방법 2. 커널 내부에 있는 각 공유 데이터에 접근할 때마다
그 데이터에 대한 Lock/Unlock을 한다.
4. Process Synchronization 문제
공유 데이터의 동시 접근은 데이터의 불일치 문제를 발생시킬 수 있다.
일관성 유지를 위해서는 협력 프로세스간의 실행 순서를 정해주는 메커니즘이 필요.
* Race Condition
- 여러 프로세스들이 동시에 공유 데이터를 접근하는 상황.
- 데이터의 최종 연산 결과는 마지막에 그 데이터를 다룬 프로세스에 따라 달라짐.
=> Race Condition을 막기 위해서는 Concurrent Process는 동기화가 되어야한다.
(= Synchronize)
5. Critical-Sectoin Problem
n개의 프로세스가 공유 데이터를 동시에 사용하기를 원하는 경우,
각 프로세스의 code segment에는 공유 데이터를 접근하는 코드인 Critcal Section이 존재.
공유 데이터를 접근하는 구역(코드)을 Critical-Section( 임계영역 )이라고 한다.
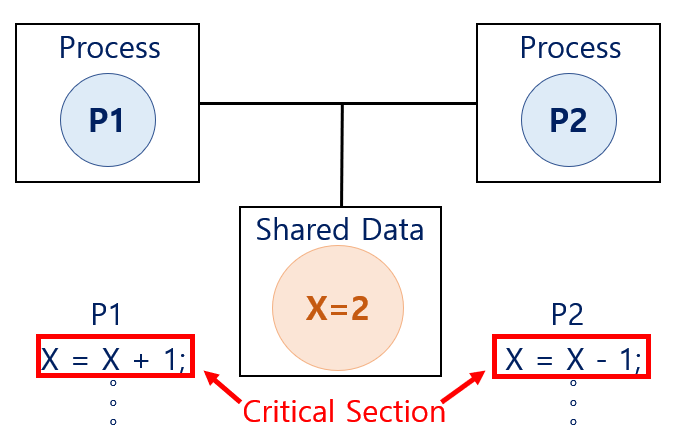
=> 하나의 프로세스가 Critical Section에 있을 때 다른 모든 프로세스는 Critical Section에 들어갈 수 없어야한다.
* 해결방법?
- 두 개의 프로세스가 있다고 가정 P0, P1
do{ entry section // => lock Critical Section exit Section // => unlock remainder section }while(1);프로세스들은 수행의 동기화를 위해 몇몇 변수를 공유할 수 있다.
=> Synchronization Variable
6. 프로그램적 해결법의 충족 조건
- Mutual Exclusion( 상호 배제 )
- 프로세스 Pi가 Critical Section 부분을 수행 중이면 다른 모든 프로세스들은 그들의 Critical Section에 들어가면 안된다.
- Progress( 진행 )
- 아무도 Critical Section에 있지 않은 상태에서 Critical Section에 들어가고자 하는 프로세스가 있으면 Critical Section에 들어가게 해줘야한다.
- Bounded Waiting( 유한 대기 )
- 프로세스가 Critical Section에 들어가려고 요청한 후부터 그 요청이 허용될 때까지 다른 프로세스들이 Critical Section에 들어가는 횟수에 한계가 있어야 한다. (= Starvation이 생기면 안된다.)
7. SW적으로 lock을 설정하는 방법
1) Algorithm-1
//Synchronization Variable
int turn;
initially turn = 0; // Pi는 turn==i 일때 critical section 들어갈 수 있음.
/* Process 0 */
do{
while(turn != 0); /* My turn? */
Critical Section
turn = 1; /* Now It's your turn */
remainder section
}while(1);
=> 순서를 정해주는 turn을 사용.
turn이 0이될때까지 대기…
turn이 0이 되면 critical section으로 들어간 뒤
turn을 1로 만들어줌.
* 문제점 : Mutual Exclusion은 만족하지만 Progress 조건을 만족 하지 못함.
과잉양보 : 반드시 한 번씩 교대로 들어가야만 함 (Swap-turn)
상대가 turn 을 내 값으로 바꿔줘야만 내가 들어갈 수 있음.
특정 프로세스가 더 빈번하게 Critical Section에 들어가야한다면 문제가 생김.
ex) 극단적인 예로,
하나는 계속해서 접근을 원하는 프로세스(P0)고 하나는 딱 한 번만 접근하는 프로세스(P1)라면 P0도 결국 P1에서 바꿔주지 않으면 접근을 하지 못하게 됨.
2) Algorithm-2
Turn을 교대로 쓰는 Algorithm-1을 보완
//Synchronization Variable
boolean flag[2];
initially flag[모두]=false; /* no one is in Critical Section */
/* Process i */
do{
flag[i] = true; /* i Critical Section 들어갑니다! */
while(flag[i]); /* i가 아직 안에 있는가? 그럼 wait */
Critical Section
flag[i] = false; /* i 이제 나갑니다~ */
remainder section
}while(1);
=> 내가 Critical Section에 들어갈거다라는 표현을 flag로 표시.
본인의 flag를 true로 만들고 상대방의 flag를 확인
상대방이 flag true라면 대기
아니면 Critical Section으로 들어간다.
다시 flag false로 만든다.
* 문제점 : Mutual Exclusion을 만족하지만 Progress 요구조건을 만족하지 않음.
P0이 flag를 true로 만들고 CPU 뺏김.
P1도 flag true로 만들고 확인해보니 P0이 flag true므로 대기
P0도 대기..
결국 아무도 들어가지 못함.
3) Algorithm-3 (Peterson’s Algorithm)
Algorithm1,Algorithm2를 조합하여 사용한 알고리즘.
/* Process i */
do{
flag[i] = true; /* i Critical Section 들어갈게요 */
turn = j; /* i가 들어갔음을 표시 */
while(flag[i] && turn == j); /* i가 아직 안에 있는가? 그럼 wait */
Critical Section
flag[i] = false; /* i 이제 나갑니다~ */
remainder section
}while(1);
=> turn과 flag 둘다 사용.
flag = true 만들고
turn 상대로 해두고
상대방의 깃발이 true이면서 상대방 턴인지 확인 => 맞다면 대기
아니라면 Critical Section에 들어감
flag = false로 만듬
* 문제점 : Mutual Exclusion 만족, Progress 만족, Bounded Waiting 만족 하지만,
Busy Waiting이 발생한다!
( = Spin Lock : lock을 걸어서 상대를 못들어가게 막는다.
누군가가 lock 걸고 Critical Section에 들어갔음.
그 후 다른애는 CPU 잡아서 쓸데 없이 while문에서 조건 검사만 하면서 CPU와 Memory를 낭비 )
8. Synchronization HardWare
하드웨어적으로 Test & Modify를 Atomic하게 수행할 수 있도록 지원하는 경우 앞의 문제는 간단히 해결
//Synchronization Variable
boolean lock = false;
/* Process i */
do{
while(Test_and_Set(lock));
Critical Section
lock = false;
remainder section
}while(1);
=> 위에서 문제가 생겼던 이유는 데이터를 읽는 것과 데이터를 쓰는 것을 하나의 Instruction으로 처리할 수 없었기 때문에 발생한 것!
( ex. 고급언어에서 Count++ 연산 => 기계어로는 Load + Inc + Store 3단계로 구성된다.)
읽고 쓰는 것을 한 번에 처리하는 H/W 적인 Instruction이 지원 된다면 lock 문제는 쉽게 해결 가능하다.
Test_and_Set은 원래의 값을 읽어내고 그 자리를 1로 Setting 한다.
cf) a가 0일때,
Test_and_Set(a) 하면 0이 읽힌 후 a값은 1로 바뀐다.
a가 1일때,
Test_and_Set(a) 하면 1이 읽힌 후 a값은 1로 바뀐다.
=> 하나의 Instruction으로 처리한다.